Project Groups
Race Against the Machine
- Project Group

The Quality of Experience (QoE) of teleoperated driving scenarios composes of the application-specific requirements and Quality of Service (QoS) served by the network. Powered by 5G communication technology the latter can be brought upon a high standard with high resilience.
Teleoperation use cases are not only relevant for rescue robotics and industrial applications, but can also be seen as an enabler towards fully autonomous driving.
As reported by the DLR, teleoperators can intervene at SAE level 4 to solve for unknown situations which will make a reliable teleoperation a legal requirement for first SAE level 4 drives.
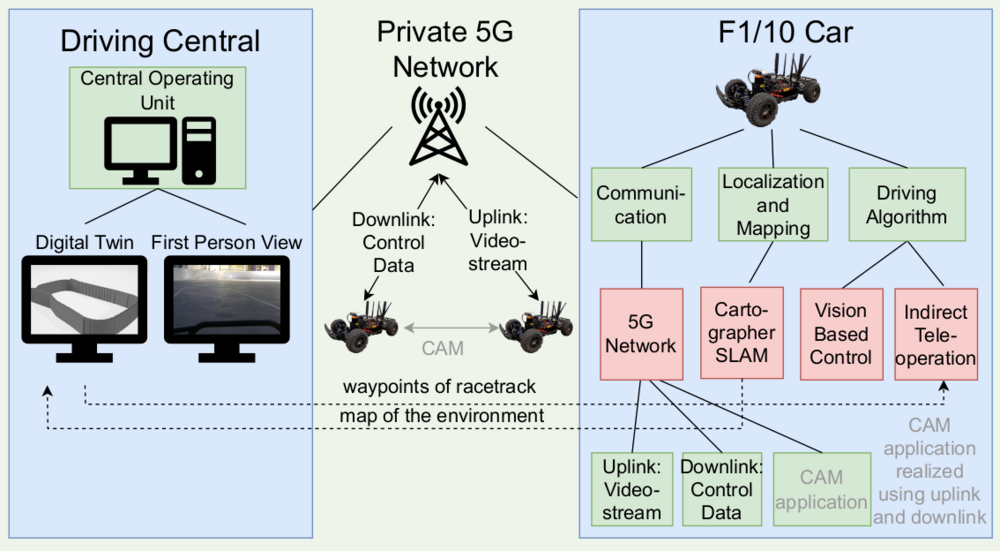
The need for autonomous vehicles in application fields like automotive and rescue robotics is highly desirable in the modern world. However, the complexities of autonomy push us to the extent that we have to investigate teleoperation approaches. This project focuses on exploring the robustness of the private 5G network in teleoperated driving and the implementation of different approaches for autonomous driving by using the small-scaled F1/10 vehicle.
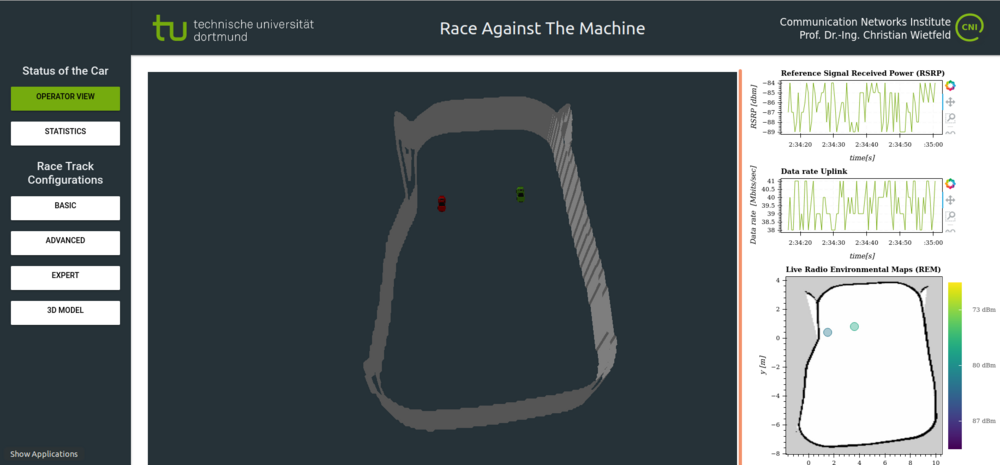
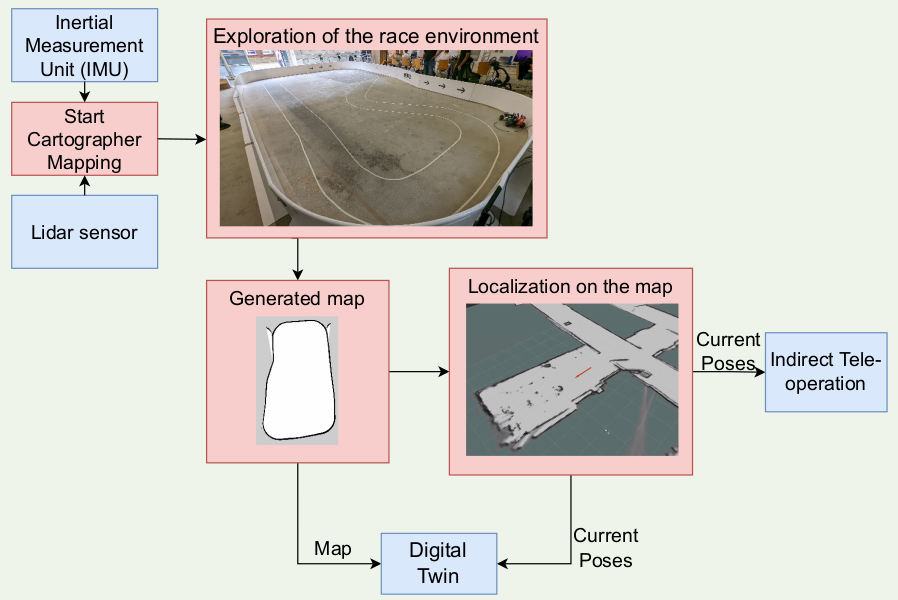
With remarks to the relevance of digital twins for future communication networks, a web-based digital twin is developed with ROS-integration to visualize the state of the environment and locations of the vehicles. To this extend Google's cartographer simulatenous localization and mapping (SLAM) is implemented and used to provide the necessary data. The web graphical user interface (GUI) furthermore allows the usage of open map data to scale down real racetracks into the laboratory environment and automatically generate track boundaries from this data. The 3D model, which is also used to visualize the digital twin, can be generated from the SLAM results, thus providing a full toolchain for small-scaled drive tests. The GUI also supports visualizations of network metrics which are provided via RESTful application programming interfaces (APIs) from the cars. Besides a first evaluation of a purely vision-based autonomous driving approach, the indirect and direct teleoperation modes are enabled and demonstrated.
Further information:
Chairs: CNI
Supervisors: Cedrik Krieger, Tim Gebauer, Hendrik Schippers, Manuel Patchou
Start date: October 2021