Prospective students visit 6G test field for wireless-enabled future vehicular and intralogistics applications
- News

Recently, CNI participated again with partners at the "SchnupperUni" (more information on the TU Dortmund university site).
The visitors from 10th grade onwards spent four days to get in touch with lectures and diverse workshops on the TU Dortmund campus.
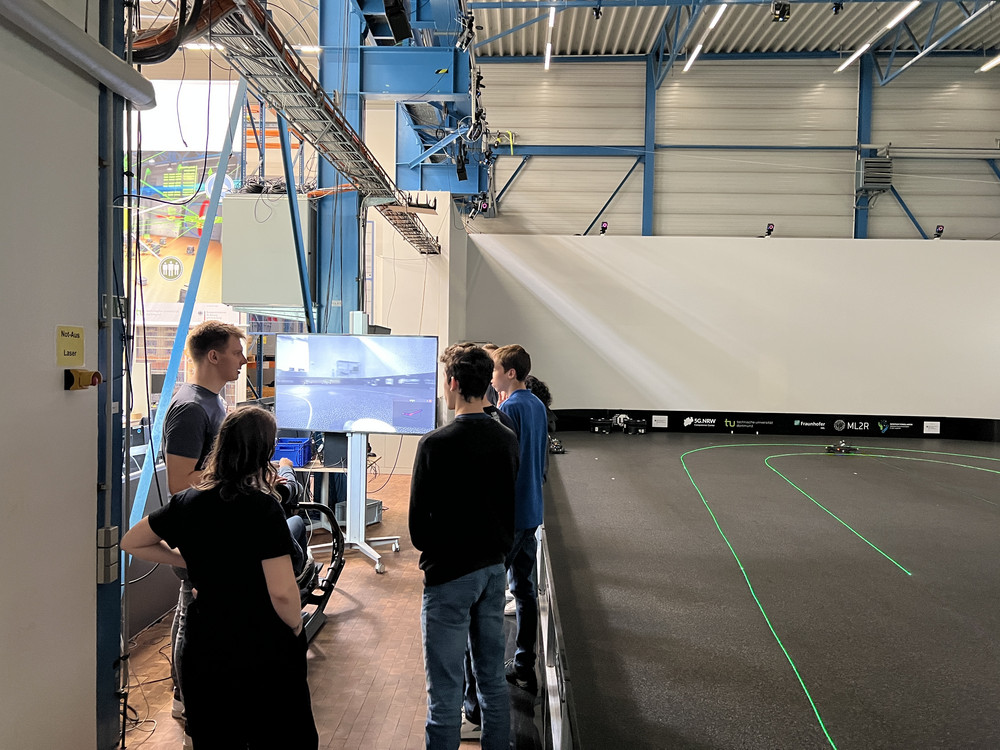
Together with research partners from the group for design automation for embedded systems (DAES, faculty of computer science) and chair of material handling and warehousing (FLW, faculty of mechanical engineering), the CNI offered a workshop on vehicular teleoperation and future wireless networks to show their latest version of a 6G testbed for scaled vehicular platforms.
At the beginning of the workshop we introduced our mobile wireless communication lab as a all-in-one solution to provide multi-network technology support in ad-hoc field deployments. On the example of rescue robotics missions the group discussed, which requirements are set to the communication system to enhance the safety of rescue forces. To extend the thoughts, our much liked spot platform, a dog-like walking robot showed up, which was recently equipped with mesh technology for device-to-device communication to be deployed in the 6GEM testfield on rescue robotics (Link).
After a short demonstration of the spot's agility and everyone getting their photo with the robot, the discussion continued and the attendees got a general idea of how radio propagation works and how network deployments are planned. The differences between Wi-Fi and 5G networks were considered and the advantages of public and private 5G frequency bands were discussed. However, all agreed, that radio signals don't have unlimited range and solutions need to be found in order to extend the capability of a single base station in order to reach sufficient coverage throughout the scene.
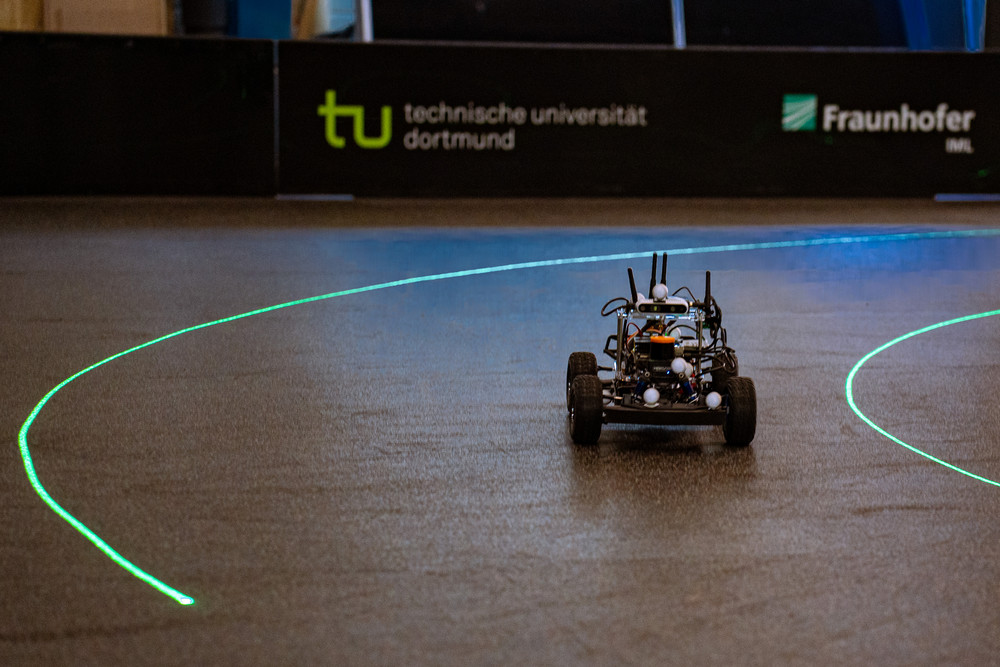
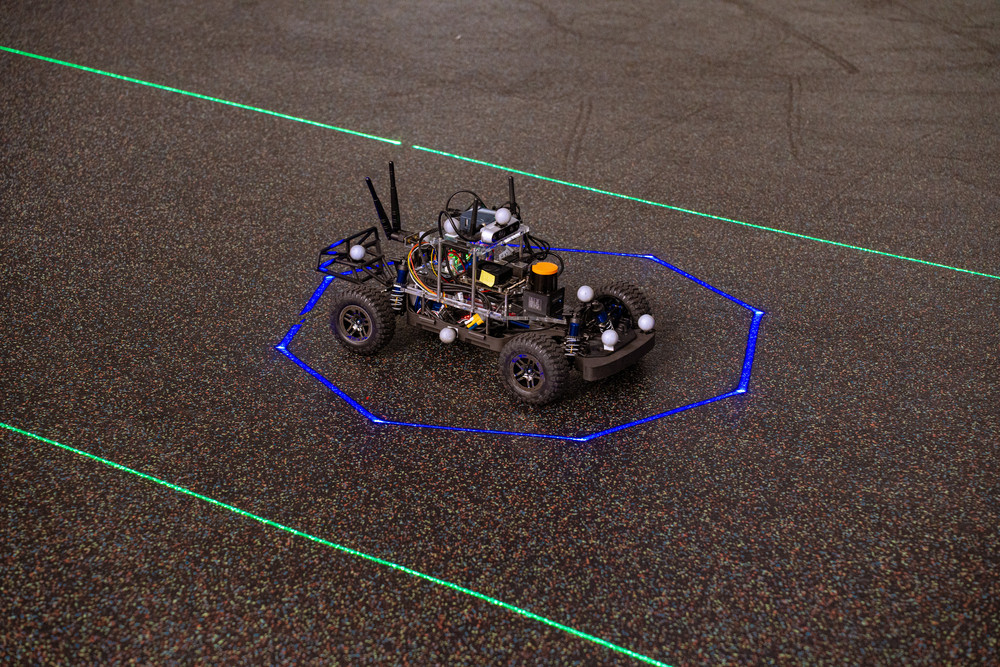
With this in mind, we transitioned towards the main part of the workshop: this was a vehicular teleoperation testbed, which has been recently presented in the context of the 6GEM research hub. For 6G-releated research, small-scaled F1/10 vehicles are equipped with mesh technology and are teleoperated from CNI's driving stand, solely based on the information given from a first person video stream. With emulation techniques inspired from a previous publication, a real-time capable digital twin keeps track of the vehicles position and calculates a model-based end-to-end network behavior, which is then applied on the physical vehicle. With this method, one meter in the testbed appears like 10 meters in reality. Thus, the teleoperator experiences a decreasing video quality ending in a disrupted connection from the vehicle to the basestation, requiring a full stop of driving.
A solution approach is also presented with an aerial node entering the scene and being placed in a central position. All network participants are running an implementation of the PARRoT routing protocol (see publication), which is then capable to autonomously select the best available route. Therefore, the video stream is running again and the vehicle is able to continue its journey over the round track. During the drive, PARRoT intelligently chooses from the available routes and, thus, enables smooth handovers which are unnoticable for the teleoperator.
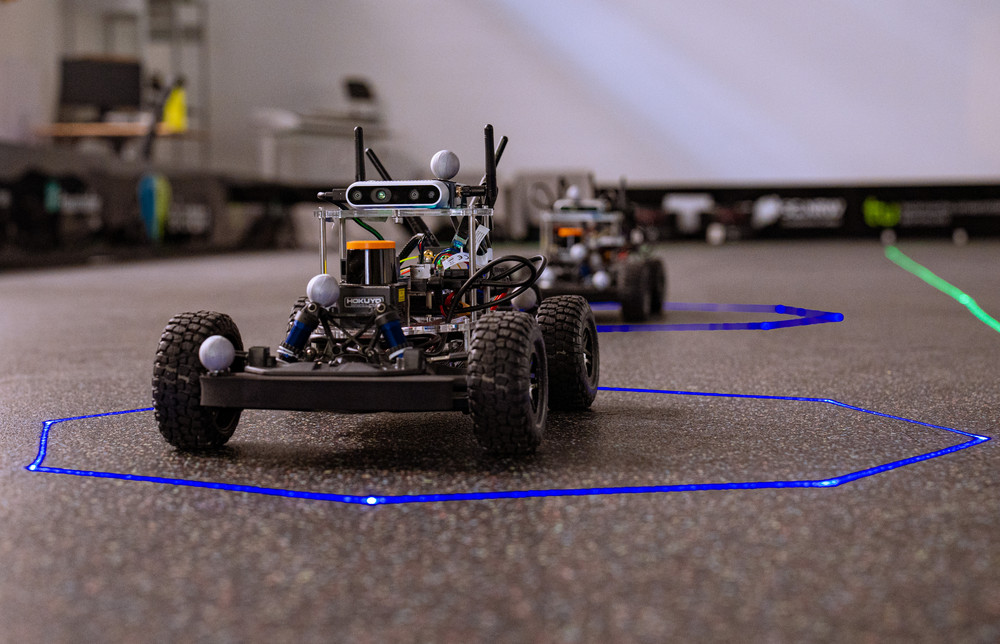
To finalize the workshop, three F1/10 vehicles were set to the scene and a platooning use case was shown. Platooning is a V2X application, where vehicles build a convoy and maintain a constant distance to their leading vehicle to reduce air resistance and increase the energy efficiency. In order to do so, vehicles use vehicle-to-vehicle communication to cooperatively share their location and control their steering. Our colleagues from DAES group implemented such algorithms for the F1/10 vehicles and we jointly integrated it with our communication stack. Truly impressive, the F1/10 vehicles pass the round track at high speeds nearly effortless while maintaining perfect distance to each other.
With this action-packed scenario in mind, the workshop came to an end and we could answer some final questions.
It was an informative and fun event. The CNI, DAES, and FLW wish the visitors all the best for their final stage of school career, and hope to see them back at TU Dortmund university soon.
Impressions of the scaled 6G automotive testbed can be seen in the video below:
Please confirm video activation.
After activation, cookies will be set and data is sent to YouTube (Google).
To the Google Privacy Policy